Navigation with a Map and GPS
Introduction:
The goal of this activity was to use a navigational map that was created a few weeks ago to navigate a course through the forest to different way-points as assigned by the instructor. The only tools we had to use where the navigational maps, one of these is seen in figure 1, and an Etrex GPS as seen in figure 2. The points were given on a sheet of paper and we had to travel from one point to the next collecting way-points all the while collecting a track log of where we traveled so a path from one point to another could be seen.

Figure 1: The navigation map used for the project.

Figure 2: An Etrex GPS was used to gather simple points and a travel track.
Methods:
The first step of the afternoon was to plot out the assigned points onto the 11x17 printout of the navigation map. This enabled the group to visualize where, in reference to the other points assigned, each point was. The most direct path to each point was then figured out with a goal of zig-zagging through the woods as little as possible. The GPS was set to collect points in Wisconsin UTM Meters and the project began. As we walked a track collected points along our path so that an overall travel route would be visible then when the exact coordinated of the points assigned were reached a way-point was added.

Figure 3: Point #1: Point one was collected as a light drizzle began to fall. There were large storm clouds on the horizon highlighting the fact that any type of weather can occur in the field and it is important to be prepared.

Figure 3: Point #2: At each data point a geotagged photo was taken as the way point was collected as proof of out finding the location in case there was a GPS technical error.

Figure 4: Point #3: Armed with a map print out, a GPS, and coordinated for assigned points, navigation

Figure 5: Point #4: Finding the exact point required several double checks and turning in circles to arrive at the exact location.

Figure 6: Point #5: The woods we navigated through were thick with the invasive species buck thorn and required a lot of changing of course to get by dead falls and ravines.
Results:
The final product of the track is visible in figure 7 as a map simplified to show the track traveled. The 50 meter grid lines were useful when determining what lines to take to the next point. The grids were used to determine rough distances between points to decide which points to collect first. Our best determined route was to go from point 2 to 4 then across to 5 and up to 1 then finally down to 3 for the very last point.
My group used different methods to get from each point to the next, most of the time a simple walking in the right direction until coordinates were narrowed down was used. When going from point 4 to 5 I held the GPS and wanted to try to use the pace count to go straight through the woods in the right direction to arrive at the point,Point 5 was 183 of my paces away from point 4. The use of this pace practice is visible on the map as a heading was taken and that direction was followed until 183 paces were reached and distance on the GPS was checked. Mild correction was needed but overall it was accurate.
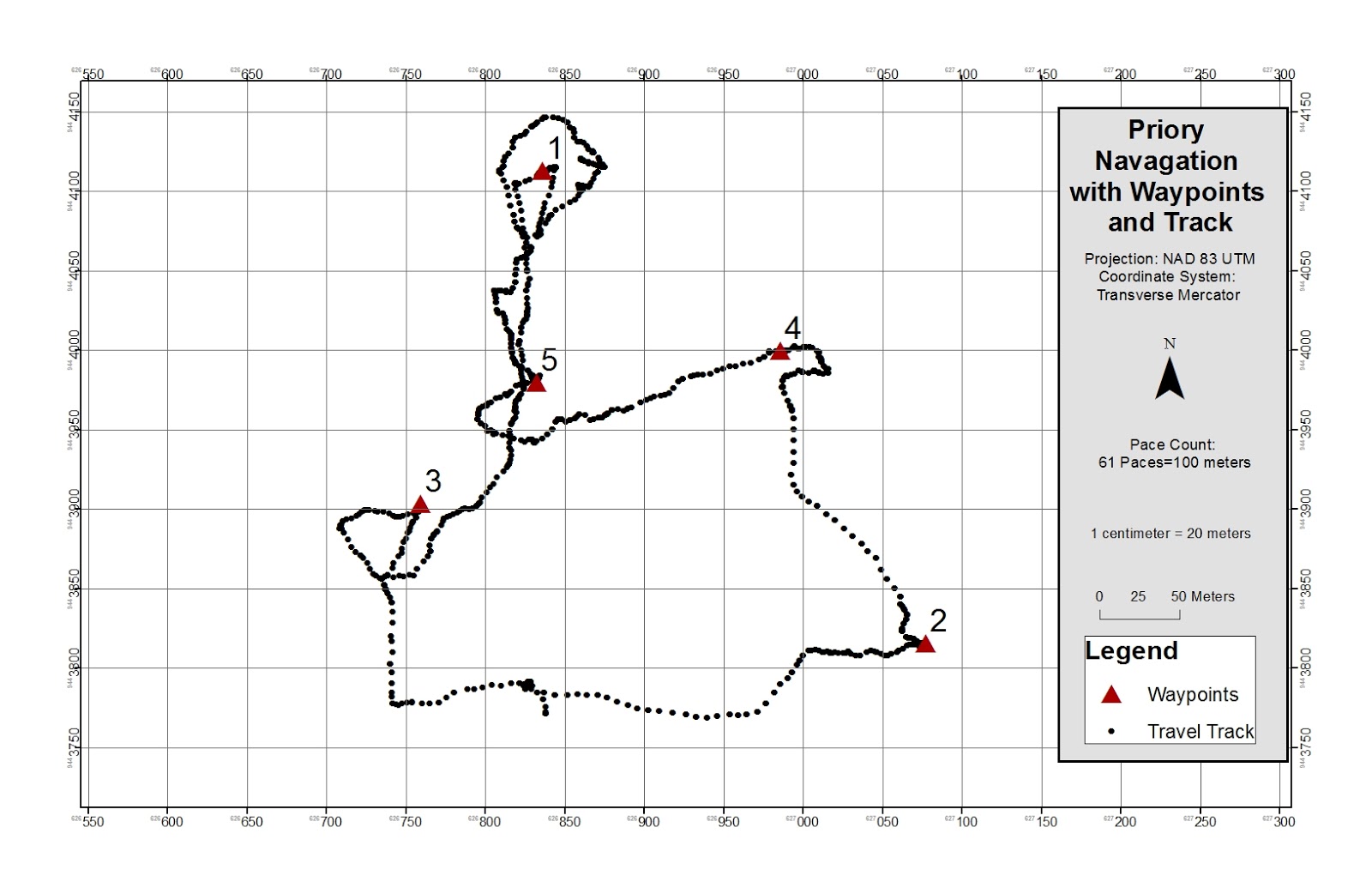
Figure 7: This simple display easily shows the track taken to and from points while on the navigation route as well as the way-points.
Discussion:
The navigation map worked surprisingly well and with each point that was collected we felt more and more confident. The hardest part was keeping the numbers in the correct order when comparing desired location to current location on the GPS, often times the numbers got jumbled and the coordinate sheet had to be referenced several times. My favorite part of this lab was absolutely seeing how accurate pace and a heading can be when going from point 4 to 5, though several scratches were gathered on that route as an attempt to maintain a straight line it was neat to use a different very basic navigation method.
Clearly, as seen on the map, some points were much easier to find, in some cases we found ourselves wandering about in circles only to arrive back at a point we had been at minutes before as seen in the case of way-point #1. Not every point was as easy to gather as the first point but overall we proved that we could use basic navigation relying on coordinates and a compass on the GPS as well as a pace count to go from point to point with relatively few errors and problems. After this lab I know better how to navigate with a map and feel confident in relying on a map I myself made to travel on an assigned route.























